
Page 200 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 200
Sensors, Navigation Agents and Arbitration
Obstacle
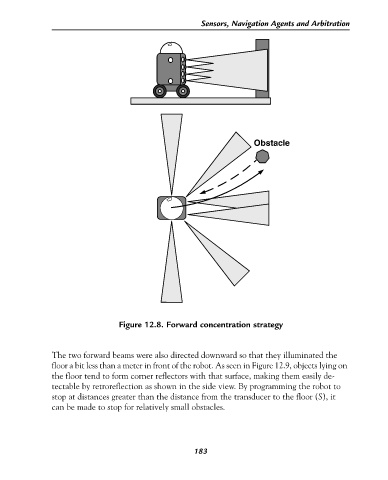
Figure 12.8. Forward concentration strategy
The two forward beams were also directed downward so that they illuminated the
floor a bit less than a meter in front of the robot. As seen in Figure 12.9, objects lying on
the floor tend to form corner reflectors with that surface, making them easily de-
tectable by retroreflection as shown in the side view. By programming the robot to
stop at distances greater than the distance from the transducer to the floor (S), it
can be made to stop for relatively small obstacles.
183