
Page 202 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 202
Sensors, Navigation Agents and Arbitration
Figure 12.10. Wide-beam retroreflection from corner of target and floor 1
(Courtesy of Cybermotion, Inc.)
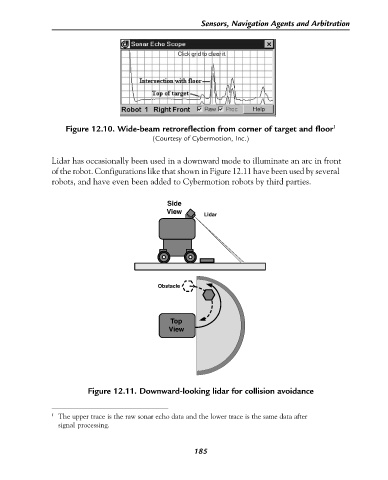
Lidar has occasionally been used in a downward mode to illuminate an arc in front
of the robot. Configurations like that shown in Figure 12.11 have been used by several
robots, and have even been added to Cybermotion robots by third parties.
Side
View
Lidar
Obstacle
Top
View
Figure 12.11. Downward-looking lidar for collision avoidance
1 The upper trace is the raw sonar echo data and the lower trace is the same data after
signal processing.
185