
Page 201 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 201
Chapter 12
Side Front
Left
View View
Side
Right
Side
Right Right Left
Catwhisker Catwhisker
Front
S
Left
Left
Side
Catwhisker
Right
Front
Top
View Left
Front
Right
Right Catwhisker
Side
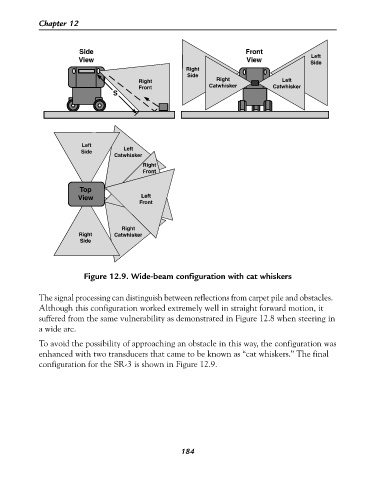
Figure 12.9. Wide-beam configuration with cat whiskers
The signal processing can distinguish between reflections from carpet pile and obstacles.
Although this configuration worked extremely well in straight forward motion, it
suffered from the same vulnerability as demonstrated in Figure 12.8 when steering in
a wide arc.
To avoid the possibility of approaching an obstacle in this way, the configuration was
enhanced with two transducers that came to be known as “cat whiskers.” The final
configuration for the SR-3 is shown in Figure 12.9.
184