
Page 197 - Designing Autonomous Mobile Robots : Inside the Mindo f an Intellegent Machine
P. 197
Chapter 12
transducer would be about 20 ms. If no time gap was used between transducer firings,
then the time to fire the whole ring would be just over one half a second. This slow
acquisition rate would severely limit the fastest speed at which the robot could safely
operate. For this reason, ring configurations are usually setup so that beam firings
overlap in time. This is done by overlapping the firing of beams that are at a signifi-
cant angle away from each other. Unfortunately, even with this precaution the process
greatly increases the number of false range readings that result from cross beam
interference.
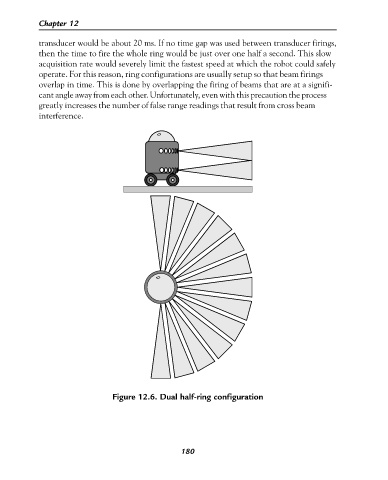
Figure 12.6. Dual half-ring configuration
180