
Page 121 - Distributed model predictive control for plant-wide systems
P. 121
Local Cost Optimization-based Distributed Model Predictive Control 95
PC
T
LC
FC
Upper Reflux
A Top Draw
T
Intermediate Reflux Side
T
Stripper
LC FC
T
A Side Draw
Bottoms Reflux
Q(F,T) T
Control
LC
F T
Bottoms
Feed
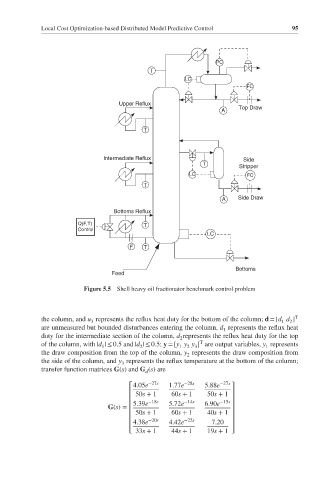
Figure 5.5 Shell heavy oil fractionator benchmark control problem
the column, and u represents the reflux heat duty for the bottom of the column; d = [d d ] T
3 1 2
are unmeasured but bounded disturbances entering the column, d represents the reflux heat
1
duty for the intermediate section of the column, d represents the reflux heat duty for the top
2
T
of the column, with |d | ≤ 0.5 and |d | ≤ 0.5; y = [y y y ] are output variables, y represents
1 2 1 2 3 1
the draw composition from the top of the column, y represents the draw composition from
2
the side of the column, and y represents the reflux temperature at the bottom of the column;
3
transfer function matrices G(s) and G (s)are
d
⎡ 4.05e −27s 1.77e −28s 5.88e −27s ⎤
⎢ 50s + 1 60s + 1 50s + 1 ⎥
⎢ −18s −14s −15s ⎥
5.39e 5.72e 6.90e
G(s)= ⎢ ⎥
⎢ 50s + 1 60s + 1 40s + 1 ⎥
⎢ −20s −22s ⎥
4.38e 4.42e 7.20
⎢ ⎥
33s + 1 44s + 1 19s + 1
⎣ ⎦