
Page 142 - Distributed model predictive control for plant-wide systems
P. 142
116 Distributed Model Predictive Control for Plant-Wide Systems
LCO-DMPC
C-DMPC
4
3.5
3
2.5
2
1.5
1
0.5
3
2 30
1
25
0 20
–1 15
log 10 γ 10
–2
–3 5 P
(a)
1
0.5
y 1
0
–0.5
5 10 15 20 25 30 35 40
Time (s)
1
0.5
y 2
0
–0.5
5 10 15 20 25 30 35 40
Time (s)
0.5
u 1 0
–0.5
5 10 15 20 25 30 35 40
Time (s)
2
1
u 2
0
–1
5 10 15 20 25 30 35 40
Time (s)
(b)
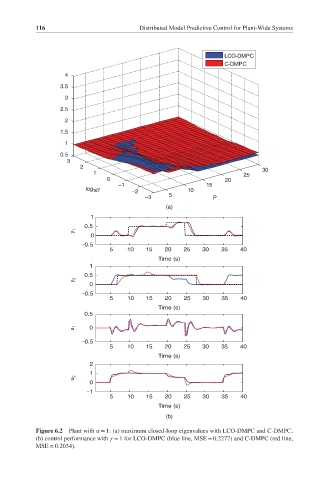
Figure 6.2 Plant with = 1: (a) maximum closed-loop eigenvalues with LCO-DMPC and C-DMPC;
(b) control performance with = 1 for LCO-DMPC (blue line, MSE = 0.2277) and C-DMPC (red line,
MSE = 0.2034).