
Page 174 - Distributed model predictive control for plant-wide systems
P. 174
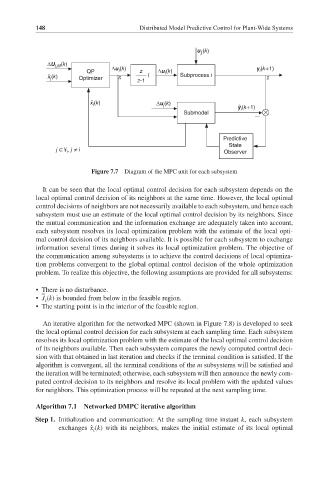
148 Distributed Model Predictive Control for Plant-Wide Systems
u j (k)
∆U j,M (k)
i
i
QP ∆u (k) z ∆u i (k) y (k+1)
ˆ x (k) Optimizer I Subprocess i
j
z-1
ˆ x i (k) ∆u j (k)
ˆ y (k+1)
i
Submodel
Predictive
State
j ∈ ¥ i , j ≠ i Observer
Figure 7.7 Diagram of the MPC unit for each subsystem
It can be seen that the local optimal control decision for each subsystem depends on the
local optimal control decision of its neighbors at the same time. However, the local optimal
control decisions of neighbors are not necessarily available to each subsystem, and hence each
subsystem must use an estimate of the local optimal control decision by its neighbors. Since
the mutual communication and the information exchange are adequately taken into account,
each subsystem resolves its local optimization problem with the estimate of the local opti-
mal control decision of its neighbors available. It is possible for each subsystem to exchange
information several times during it solves its local optimization problem. The objective of
the communication among subsystems is to achieve the control decisions of local optimiza-
tion problems convergent to the global optimal control decision of the whole optimization
problem. To realize this objective, the following assumptions are provided for all subsystems:
• There is no disturbance.
• J (k) is bounded from below in the feasible region.
i
• The starting point is in the interior of the feasible region.
An iterative algorithm for the networked MPC (shown in Figure 7.8) is developed to seek
the local optimal control decision for each subsystem at each sampling time. Each subsystem
resolves its local optimization problem with the estimate of the local optimal control decision
of its neighbors available. Then each subsystem compares the newly computed control deci-
sion with that obtained in last iteration and checks if the terminal condition is satisfied. If the
algorithm is convergent, all the terminal conditions of the m subsystems will be satisfied and
the iteration will be terminated; otherwise, each subsystem will then announce the newly com-
puted control decision to its neighbors and resolve its local problem with the updated values
for neighbors. This optimization process will be repeated at the next sampling time.
Algorithm 7.1 Networked DMPC iterative algorithm
Step 1. Initialization and communication: At the sampling time instant k, each subsystem
exchanges ̂x (k) with its neighbors, makes the initial estimate of its local optimal
i