
Page 122 - Dynamics of Mechanical Systems
P. 122
0593_C04*_fm Page 103 Monday, May 6, 2002 2:06 PM
Kinematics of a Rigid Body 103
4.10 Points Moving on a Rigid Body
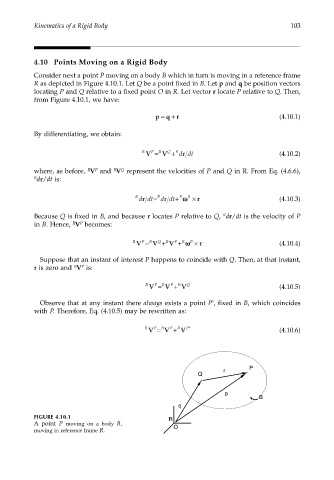
Consider next a point P moving on a body B which in turn is moving in a reference frame
R as depicted in Figure 4.10.1. Let Q be a point fixed in B. Let p and q be position vectors
locating P and Q relative to a fixed point O in R. Let vector r locate P relative to Q. Then,
from Figure 4.10.1, we have:
+
=
pq r (4.10.1)
By differentiating, we obtain:
V = V + ddt (4.10.2)
R P R Q R
r
P
R
where, as before, V and V represent the velocities of P and Q in R. From Eq. (4.6.6),
Q
R
R dr/dt is:
R ddt= B d dt+ ωω R × r (4.10.3)
R
r
r
R
Because Q is fixed in B, and because r locates P relative to Q, dr/dt is the velocity of P
in B. Hence, V becomes:
R
P
Q
R
P
P
R V = R V + B V + ωω B × r (4.10.4)
Suppose that an instant of interest P happens to coincide with Q. Then, at that instant,
P
R
r is zero and V is:
P
R V = B V + R V Q (4.10.5)
P
*
Observe that at any instant there always exists a point P , fixed in B, which coincides
with P. Therefore, Eq. (4.10.5) may be rewritten as:
P
R V = B V + R V P* (4.10.6)
P
P
r
Q
p
B
q
FIGURE 4.10.1 R
A point P moving on a body B, O
moving in reference frame R.