
Page 132 - Dynamics of Mechanical Systems
P. 132
0593_C04*_fm Page 113 Monday, May 6, 2002 2:06 PM
Kinematics of a Rigid Body 113
b θ
G r
C
3
r
h
C
2
θ
O
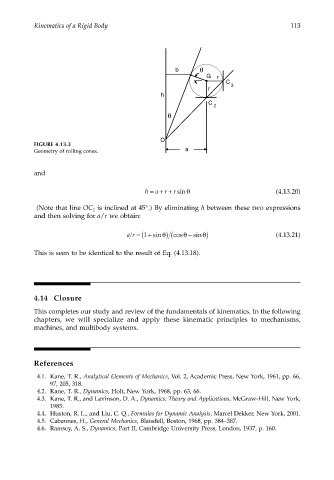
FIGURE 4.13.3
Geometry of rolling cones. a
and
h =+ + (4.13.20)
a r rsinθ
(Note that line OC is inclined at 45°.) By eliminating h between these two expressions
2
and then solving for a/r we obtain:
ar = (1 sinθ ) (cosθ − sinθ ) (4.13.21)
+
This is seen to be identical to the result of Eq. (4.13.18).
4.14 Closure
This completes our study and review of the fundamentals of kinematics. In the following
chapters, we will specialize and apply these kinematic principles to mechanisms,
machines, and multibody systems.
References
4.1. Kane, T. R., Analytical Elements of Mechanics, Vol. 2, Academic Press, New York, 1961, pp. 66,
97, 205, 318.
4.2. Kane, T. R., Dynamics, Holt, New York, 1968, pp. 63, 66.
4.3. Kane, T. R., and Levinson, D. A., Dynamics: Theory and Applications, McGraw-Hill, New York,
1985.
4.4. Huston, R. L., and Liu, C. Q., Formulas for Dynamic Analysis, Marcel Dekker, New York, 2001.
4.5. Cabannes, H., General Mechanics, Blaisdell, Boston, 1968, pp. 384–387.
4.6. Ramsey, A. S., Dynamics, Part II, Cambridge University Press, London, 1937, p. 160.