
Page 507 - Dynamics of Mechanical Systems
P. 507
0593_C14_fm Page 488 Tuesday, May 7, 2002 6:56 AM
488 Dynamics of Mechanical Systems
or
˙˙ ω + Ω 2 (I 11 − I 22)(I 11 − I 33) ω = 0 (14.4.25)
*
*
2 2
II
22 33
Inspection of Eq. (14.4.25) shows that the disturbance ω * 2 will remain small and the
motion of B will be stable if the coefficient of ω * is positive, and that this will occur if I
2 11
is either a maximum or minimum movement of inertia. If I is an intermediate valued
11
moment of inertia (that is, if I < I < I or I < I < I ), the motion will be unstable.
33
22
11
22
33
11
14.5 The Rolling/Pivoting Circular Disk
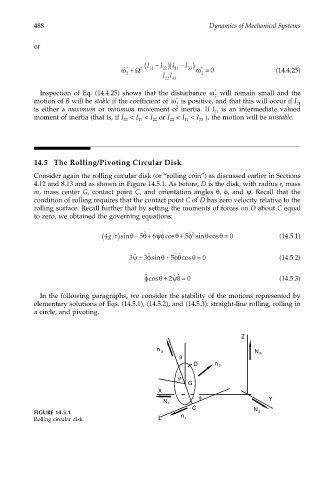
Consider again the rolling circular disk (or “rolling coin”) as discussed earlier in Sections
4.12 and 8.13 and as shown in Figure 14.5.1. As before, D is the disk, with radius r, mass
m, mass center G, contact point C, and orientation angles θ, φ, and ψ. Recall that the
condition of rolling requires that the contact point C of D has zero velocity relative to the
rolling surface. Recall further that by setting the moments of forces on D about C equal
to zero, we obtained the governing equations:
( 4gr)sinθ − θ 6ψφ cosθ + 5φ 2 ˙ sin cosθ = 0 (14.5.1)
˙˙
θ
5 + ˙ ˙
˙ ˙
˙˙
3 ˙˙ ψ + 3 sinθ + 5φθ cosθ = 0 (14.5.2)
φ
˙ ˙
φ ˙˙ cosθ + 2 ψθ = 0 (14.5.3)
In the following paragraphs, we consider the stability of the motions represented by
elementary solutions of Eqs. (14.5.1), (14.5.2), and (14.5.3): straight-line rolling, rolling in
a circle, and pivoting.
Z
n
3 N 3
θ
D n 2
ψ
G
X
φ Y
N 1
C N
FIGURE 14.5.1 n 2
Rolling circular disk. L 1