
Page 109 - Flexible Robotics in Medicine
P. 109
94 Chapter 4
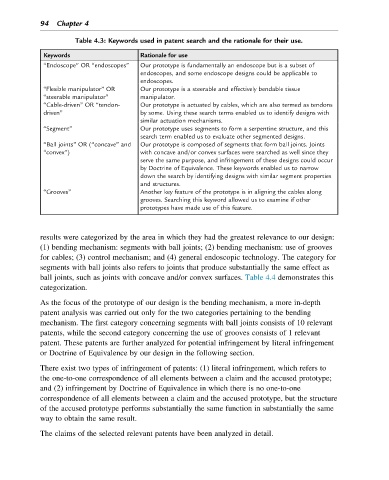
Table 4.3: Keywords used in patent search and the rationale for their use.
Keywords Rationale for use
“Endoscope” OR “endoscopes” Our prototype is fundamentally an endoscope but is a subset of
endoscopes, and some endoscope designs could be applicable to
endoscopes.
“Flexible manipulator” OR Our prototype is a steerable and effectively bendable tissue
“steerable manipulator” manipulator.
“Cable-driven” OR “tendon- Our prototype is actuated by cables, which are also termed as tendons
driven” by some. Using these search terms enabled us to identify designs with
similar actuation mechanisms.
“Segment” Our prototype uses segments to form a serpentine structure, and this
search term enabled us to evaluate other segmented designs.
“Ball joints” OR (“concave” and Our prototype is composed of segments that form ball joints. Joints
“convex”) with concave and/or convex surfaces were searched as well since they
serve the same purpose, and infringement of these designs could occur
by Doctrine of Equivalence. These keywords enabled us to narrow
down the search by identifying designs with similar segment properties
and structures.
“Grooves” Another key feature of the prototype is in aligning the cables along
grooves. Searching this keyword allowed us to examine if other
prototypes have made use of this feature.
results were categorized by the area in which they had the greatest relevance to our design:
(1) bending mechanism: segments with ball joints; (2) bending mechanism: use of grooves
for cables; (3) control mechanism; and (4) general endoscopic technology. The category for
segments with ball joints also refers to joints that produce substantially the same effect as
ball joints, such as joints with concave and/or convex surfaces. Table 4.4 demonstrates this
categorization.
As the focus of the prototype of our design is the bending mechanism, a more in-depth
patent analysis was carried out only for the two categories pertaining to the bending
mechanism. The first category concerning segments with ball joints consists of 10 relevant
patents, while the second category concerning the use of grooves consists of 1 relevant
patent. These patents are further analyzed for potential infringement by literal infringement
or Doctrine of Equivalence by our design in the following section.
There exist two types of infringement of patents: (1) literal infringement, which refers to
the one-to-one correspondence of all elements between a claim and the accused prototype;
and (2) infringement by Doctrine of Equivalence in which there is no one-to-one
correspondence of all elements between a claim and the accused prototype, but the structure
of the accused prototype performs substantially the same function in substantially the same
way to obtain the same result.
The claims of the selected relevant patents have been analyzed in detail.