
Page 110 - Flexible Robotics in Medicine
P. 110
Flexible steerable manipulator utilizing complementary configuration 95
Key features Comments on relevance
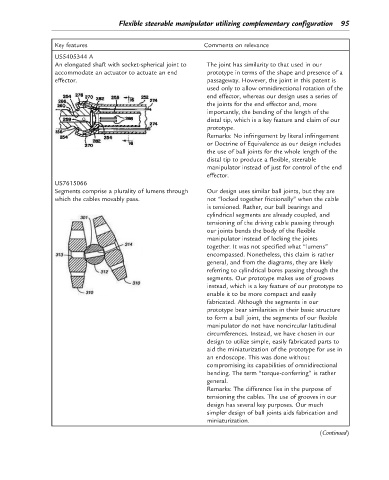
US5405344 A
An elongated shaft with socket-spherical joint to The joint has similarity to that used in our
accommodate an actuator to actuate an end prototype in terms of the shape and presence of a
effector. passageway. However, the joint in this patent is
used only to allow omnidirectional rotation of the
end effector, whereas our design uses a series of
the joints for the end effector and, more
importantly, the bending of the length of the
distal tip, which is a key feature and claim of our
prototype.
Remarks: No infringement by literal infringement
or Doctrine of Equivalence as our design includes
the use of ball joints for the whole length of the
distal tip to produce a flexible, steerable
manipulator instead of just for control of the end
effector.
US7615066
Segments comprise a plurality of lumens through Our design uses similar ball joints, but they are
which the cables movably pass. not “locked together frictionally” when the cable
is tensioned. Rather, our ball bearings and
cylindrical segments are already coupled, and
tensioning of the driving cable passing through
our joints bends the body of the flexible
manipulator instead of locking the joints
together. It was not specified what “lumens”
encompassed. Nonetheless, this claim is rather
general, and from the diagrams, they are likely
referring to cylindrical bores passing through the
segments. Our prototype makes use of grooves
instead, which is a key feature of our prototype to
enable it to be more compact and easily
fabricated. Although the segments in our
prototype bear similarities in their basic structure
to form a ball joint, the segments of our flexible
manipulator do not have noncircular latitudinal
circumferences. Instead, we have chosen in our
design to utilize simple, easily fabricated parts to
aid the miniaturization of the prototype for use in
an endoscope. This was done without
compromising its capabilities of omnidirectional
bending. The term “torque-conferring” is rather
general.
Remarks: The difference lies in the purpose of
tensioning the cables. The use of grooves in our
design has several key purposes. Our much
simpler design of ball joints aids fabrication and
miniaturization.
(Continued)