
Page 121 - Flexible Robotics in Medicine
P. 121
Modular origami joint operator to create bendable motions with multiple radii 107
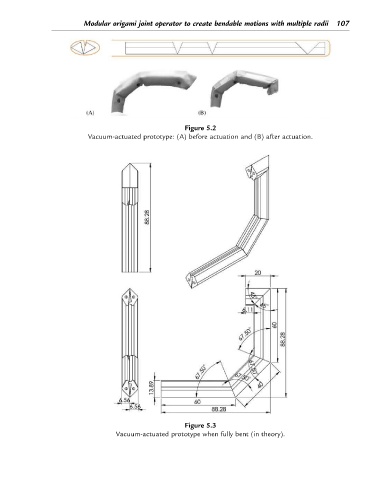
Figure 5.2
Vacuum-actuated prototype: (A) before actuation and (B) after actuation.
Figure 5.3
Vacuum-actuated prototype when fully bent (in theory).