
Page 124 - Flexible Robotics in Medicine
P. 124
110 Chapter 5
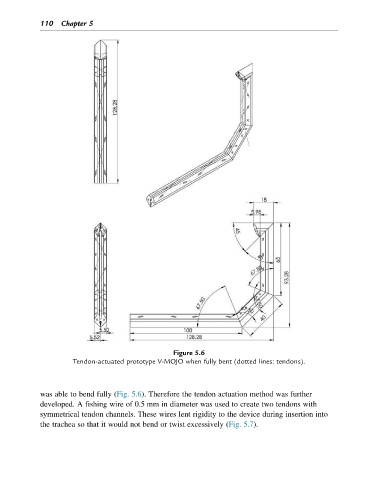
Figure 5.6
Tendon-actuated prototype V-MOJO when fully bent (dotted lines: tendons).
was able to bend fully (Fig. 5.6). Therefore the tendon actuation method was further
developed. A fishing wire of 0.5 mm in diameter was used to create two tendons with
symmetrical tendon channels. These wires lent rigidity to the device during insertion into
the trachea so that it would not bend or twist excessively (Fig. 5.7).