
Page 125 - Flexible Robotics in Medicine
P. 125
Modular origami joint operator to create bendable motions with multiple radii 111
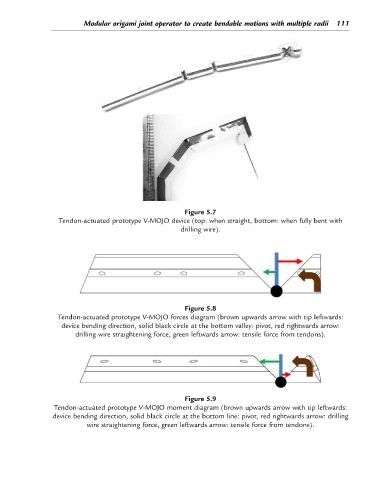
Figure 5.7
Tendon-actuated prototype V-MOJO device (top: when straight, bottom: when fully bent with
drilling wire).
Figure 5.8
Tendon-actuated prototype V-MOJO forces diagram (brown upwards arrow with tip leftwards:
device bending direction, solid black circle at the bottom valley: pivot, red rightwards arrow:
drilling wire straightening force, green leftwards arrow: tensile force from tendons).
Figure 5.9
Tendon-actuated prototype V-MOJO moment diagram (brown upwards arrow with tip leftwards:
device bending direction, solid black circle at the bottom line: pivot, red rightwards arrow: drilling
wire straightening force, green leftwards arrow: tensile force from tendons).