
Page 127 - Flexible Robotics in Medicine
P. 127
Modular origami joint operator to create bendable motions with multiple radii 113
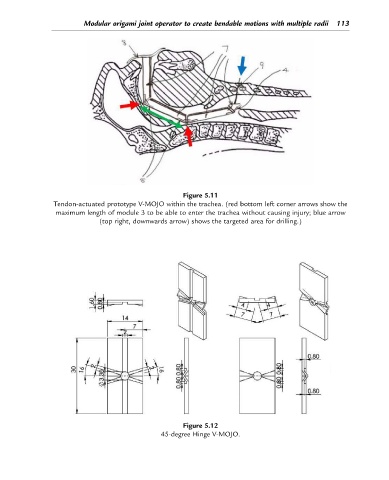
Figure 5.11
Tendon-actuated prototype V-MOJO within the trachea. (red bottom left corner arrows show the
maximum length of module 3 to be able to enter the trachea without causing injury; blue arrow
(top right, downwards arrow) shows the targeted area for drilling.)
Figure 5.12
45-degree Hinge V-MOJO.