
Page 329 - Flexible Robotics in Medicine
P. 329
Design evolution of a flexible robotic bending end-effector for transluminal explorations 319
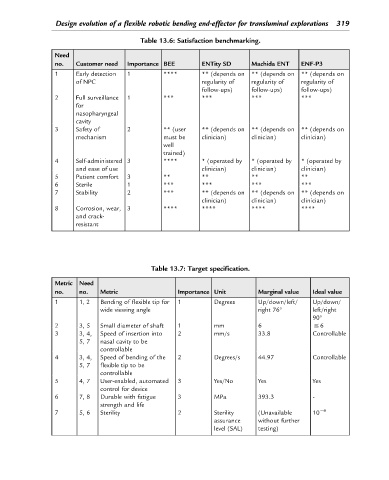
Table 13.6: Satisfaction benchmarking.
Need
no. Customer need Importance BEE ENTity SD Machida ENT ENF-P3
1 Early detection 1 **** ** (depends on ** (depends on ** (depends on
of NPC regularity of regularity of regularity of
follow-ups) follow-ups) follow-ups)
2 Full surveillance 1 *** *** *** ***
for
nasopharyngeal
cavity
3 Safety of 2 ** (user ** (depends on ** (depends on ** (depends on
mechanism must be clinician) clinician) clinician)
well
trained)
4 Self-administered 3 **** * (operated by * (operated by * (operated by
and ease of use clinician) clinician) clinician)
5 Patient comfort 3 ** ** ** **
6 Sterile 1 *** *** *** ***
7 Stability 2 *** ** (depends on ** (depends on ** (depends on
clinician) clinician) clinician)
8 Corrosion, wear, 3 **** **** **** ****
and crack-
resistant
Table 13.7: Target specification.
Metric Need
no. no. Metric Importance Unit Marginal value Ideal value
1 1, 2 Bending of flexible tip for 1 Degrees Up/down/left/ Up/down/
wide viewing angle right 76 left/right
90
2 3, 5 Small diameter of shaft 1 mm 6 # 6
3 3, 4, Speed of insertion into 2 mm/s 33.8 Controllable
5, 7 nasal cavity to be
controllable
4 3, 4, Speed of bending of the 2 Degrees/s 44.97 Controllable
5, 7 flexible tip to be
controllable
5 4, 7 User-enabled, automated 3 Yes/No Yes Yes
control for device
6 7, 8 Durable with fatigue 3 MPa 393.3 -
strength and life
7 5, 6 Sterility 2 Sterility (Unavailable 10 26
assurance without further
level (SAL) testing)