
Page 429 - Flexible Robotics in Medicine
P. 429
Flexible drill manipulator utilizing different rolling sliding joints for transoral drilling 423
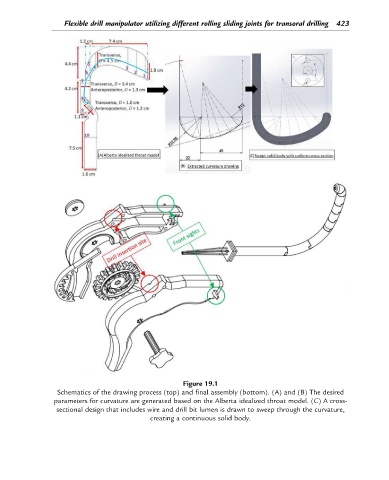
Figure 19.1
Schematics of the drawing process (top) and final assembly (bottom). (A) and (B) The desired
parameters for curvature are generated based on the Alberta idealized throat model. (C) A cross-
sectional design that includes wire and drill bit lumen is drawn to sweep through the curvature,
creating a continuous solid body.