
Page 433 - Flexible Robotics in Medicine
P. 433
Flexible drill manipulator utilizing different rolling sliding joints for transoral drilling 427
0
When we shift the wire placement in our round designs, much lesser sliding of point A was
observed (Fig. 19.6). However, this problem persists for the last few segments of the
Goldrill body, because they bear significant moment arms.
We subsequently changed only the last two segments counted from handle to full
male female mechanism, as shown in Fig. 19.7. The highlighted wedges are to provide
extra shielding against detaching motion. However, we underestimated the brittleness of our
prototyping 3D printing material, and all circled points are very prone to breakage, and thus
they limit the minimum size of the cross-sectional design. Therefore, we removed these
points in or final prototype, as shown in Fig. 19.8.
19.3.5 Wire placement and cross-sectional shape selection
We started our cross-sectional design with elliptical shape, because it is the best fit for
trachea inner lumen, and we can customize to the minimal size by further trimming to a
“soap-like” ellipse (Fig. 19.9). Its disadvantage is the wires can only be at sides. For better
balancing and space requirements, if we are to shift wires to dorsal/frontal positions, we
must use circular cross-sectional designs. We also found from version R1 that the “top-
down” placement of two wires is an imbalanced design and requires too much space for
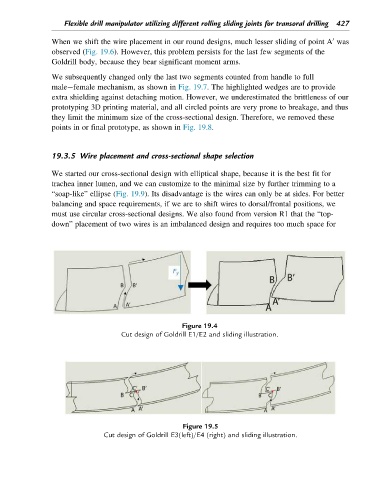
Figure 19.4
Cut design of Goldrill E1/E2 and sliding illustration.
Figure 19.5
Cut design of Goldrill E3(left)/E4 (right) and sliding illustration.