
Page 441 - Flexible Robotics in Medicine
P. 441
Flexible drill manipulator utilizing different rolling sliding joints for transoral drilling 435
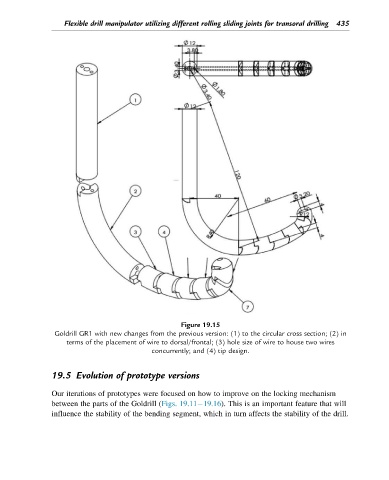
Figure 19.15
Goldrill GR1 with new changes from the previous version: (1) to the circular cross section; (2) in
terms of the placement of wire to dorsal/frontal; (3) hole size of wire to house two wires
concurrently; and (4) tip design.
19.5 Evolution of prototype versions
Our iterations of prototypes were focused on how to improve on the locking mechanism
between the parts of the Goldrill (Figs. 19.11 19.16). This is an important feature that will
influence the stability of the bending segment, which in turn affects the stability of the drill.