
Page 442 - Flexible Robotics in Medicine
P. 442
436 Chapter 19
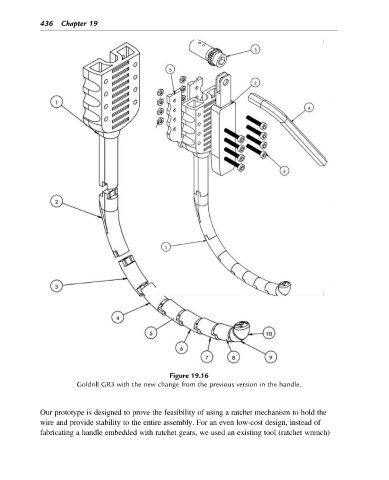
Figure 19.16
Goldrill GR3 with the new change from the previous version in the handle.
Our prototype is designed to prove the feasibility of using a ratchet mechanism to hold the
wire and provide stability to the entire assembly. For an even low-cost design, instead of
fabricating a handle embedded with ratchet gears, we used an existing tool (ratchet wrench)