
Page 326 - Fluid-Structure Interactions Slender Structure and Axial Flow (Volume 1)
P. 326
PIPES CONVEYING FLUID: NONLINEAR AND CHAOTIC DYNAMICS 307
41
Region I Region I1 Region I11
(a)
42
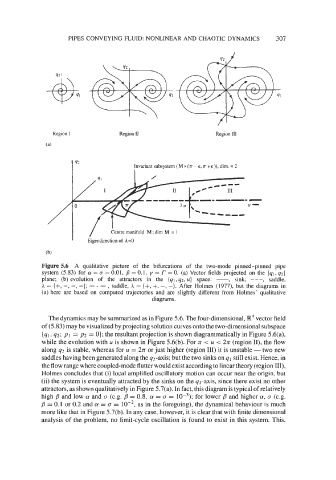
Invariant subsystem (M x (P - E, 7r +E)), dim. = 2
------
u-
Centre manifold M; dim M = 1
Eigendirection of A=O
Figure 5.6 A qualitative picture of the bifurcations of the two-mode pinned-pinned pipe
system (5.83) for a = CJ = 0.01, = 0.1, y = r = 0. (a) Vector fields projected on the [SI, q2]
plane; (b) evolution of the attractors in the [ql, q2, u) space: ~ , sink; ---, saddle,
h = [+, -, -, -1; - - , saddle, h = [+, +, -, -1. After Holmes (1977), but the diagrams in
-
(a) here are based on computed trajectories and are slightly different from Holmes’ qualitative
diagrams.
The dynamics may be summarized as in Figure 5.6. The four-dimensional, R4 vector field
of (5.83) may be visualized by projecting solution curves onto the two-dimensional subspace
{ql, q2; pi = p2 = 0); the resultant projection is shown diagrammatically in Figure 5.6(a),
while the evolution with u is shown in Figure 5.6(b). For n < u < 2n (region II), the flow
along q2 is stable, whereas for u = 2n or just higher (region 111) it is unstable - two new
saddles having been generated along the qz-axis; but the two sinks on q1 still exist. Hence, in
the flow range where coupled-mode flutter would exist according to linear theory (region 111).
Holmes concludes that (i) local amplified oscillatory motion can occur near the origin, but
(ii) the system is eventually attracted by the sinks on the q1 -axis, since there exist no other
attractors, as shown qualitatively in Figure 5.7(a). In fact, this diagram is typical of relatively
high B and low a! and (T (eg B = 0.8, a! = (T = lop3); for lower B and higher a!, (T (e.g.
B = 0.1 or 0.2 and a! = o = lo-*, as in the foregoing), the dynamical behaviour is much
more like that in Figure 5.7(b). In any case, however, it is clear that with finite dimensional
analysis of the problem, no limit-cycle oscillation is found to exist in this system. This,