
Page 445 - Fluid-Structure Interactions Slender Structure and Axial Flow (Volume 1)
P. 445
CURVED PIPES CONVEYING FLUID 417
In (ii) and (iii), the steady forces depend on fluid friction. Accordingly, variants of the
theory considering the fluid to be inviscid or viscous are formulated.
Of course, theories (i) and (ii) are variants of then already available theories. The
strength of the Misra et al. work lies in deriving both inextensible and extensible theories
from the same basic trunk, and thus having control over the assumptions and parameter
differences between them; and hence being able to make meaningful comparisons between
their predictions. It should also be mentioned that little cross-comparison between the
various theories was done theretofore, and even less systematic analysis of the reasons
for the differences between their predictions.
Therefore, since theoretical models (i) and (ii) substantially incorporate the salient
features of all the aforementioned inextensible and extensible theories, and since, as will
be shown, model (iii) succeeds in isolating the important physical differences between
them, this work (Misra et al. 1988a,b,c) provides the backbone of the material to be
presented in this chapter.
Other work on this topic was undertaken by Fan & Chen (1987), who studied three-
dimensionally curved helical pipes (the only such study), and Aithal & Gipson (1990),
who studied the effect of dissipative forces on stability, both making the inextensibility
assumption. KO & Bert (1984, 1986) undertook a nonlinear study of the system, and
Steindl & Troger (1994) looked into the possibility of chaotic motions of cantilevered
curved pipes. More will be said about these studies in the following sections.
Finally, a thorough study of the equations of motion was undertaken by Dupuis
& Rousselet (1992), who concluded that ‘the stressed-by-flow configuration . . . is the
only equilibrium state adequate for the study of the linear stability of such pipe-fluid
systems’ - as Misra et al. had concluded and as we, in due course, shall do here.
6.2 FORMULATION OF THE PROBLEM
6.2.1 Kinematics of the system
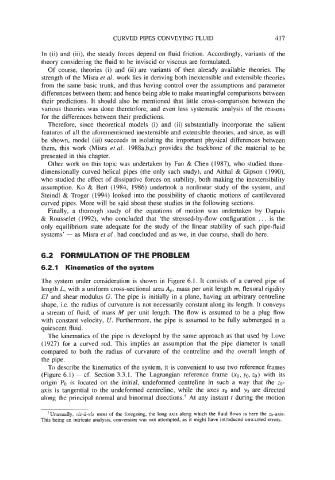
The system under consideration is shown in Figure 6.1. It consists of a curved pipe of
length L, with a uniform cross-sectional area Ap, mass per unit length m, flexural rigidity
EZ and shear modulus G. The pipe is initially in a plane, having an arbitrary centreline
shape, i.e. the radius of curvature is not necessarily constant along its length. It conveys
a stream of fluid, of mass M per unit length. The flow is assumed to be a plug flow
with constant velocity, U. Furthermore, the pipe is assumed to be fully submerged in a
quiescent fluid.
The kinematics of the pipe is developed by the same approach as that used by Love
(1927) for a curved rod. This implies an assumption that the pipe diameter is small
compared to both the radius of curvature of the centreline and the overall length of
the pipe.
To describe the kinematics of the system, it is convenient to use two reference frames
(Figure 6.1) - cf. Section 3.3.1. The Lagrangian reference frame (XO, yo, ZO) with its
origin PO is located on the initial, undeformed centreline in such a way that the ZO-
axis is tangential to the undeformed centreline, while the axes xo and yo are directed
along the principal normal and binormal directions.+ At any instant t during the motion
+Unusually, vis-&vis most of the foregoing, the long axis along which the fluid flows is here the zo-axis.
This being an intricate analysis, conversion was not attempted, as it might have introduced unwanted errors.