
Page 407 - Fundamentals of Radar Signal Processing
P. 407
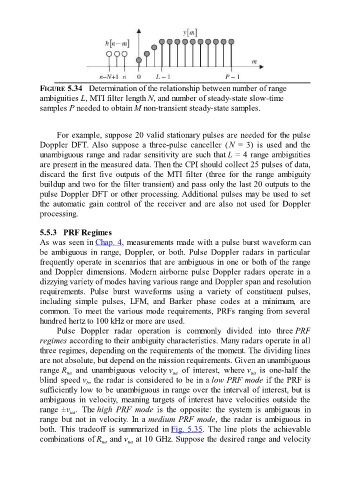
FIGURE 5.34 Determination of the relationship between number of range
ambiguities L, MTI filter length N, and number of steady-state slow-time
samples P needed to obtain M non-transient steady-state samples.
For example, suppose 20 valid stationary pulses are needed for the pulse
Doppler DFT. Also suppose a three-pulse canceller (N = 3) is used and the
unambiguous range and radar sensitivity are such that L = 4 range ambiguities
are present in the measured data. Then the CPI should collect 25 pulses of data,
discard the first five outputs of the MTI filter (three for the range ambiguity
buildup and two for the filter transient) and pass only the last 20 outputs to the
pulse Doppler DFT or other processing. Additional pulses may be used to set
the automatic gain control of the receiver and are also not used for Doppler
processing.
5.5.3 PRF Regimes
As was seen in Chap. 4, measurements made with a pulse burst waveform can
be ambiguous in range, Doppler, or both. Pulse Doppler radars in particular
frequently operate in scenarios that are ambiguous in one or both of the range
and Doppler dimensions. Modern airborne pulse Doppler radars operate in a
dizzying variety of modes having various range and Doppler span and resolution
requirements. Pulse burst waveforms using a variety of constituent pulses,
including simple pulses, LFM, and Barker phase codes at a minimum, are
common. To meet the various mode requirements, PRFs ranging from several
hundred hertz to 100 kHz or more are used.
Pulse Doppler radar operation is commonly divided into three PRF
regimes according to their ambiguity characteristics. Many radars operate in all
three regimes, depending on the requirements of the moment. The dividing lines
are not absolute, but depend on the mission requirements. Given an unambiguous
range R and unambiguous velocity v of interest, where v is one-half the
ua
ua
ua
blind speed v , the radar is considered to be in a low PRF mode if the PRF is
b
sufficiently low to be unambiguous in range over the interval of interest, but is
ambiguous in velocity, meaning targets of interest have velocities outside the
range ±v . The high PRF mode is the opposite: the system is ambiguous in
ua
range but not in velocity. In a medium PRF mode, the radar is ambiguous in
both. This tradeoff is summarized in Fig. 5.35. The line plots the achievable
combinations of R and v at 10 GHz. Suppose the desired range and velocity
ua
ua