
Page 405 - Fundamentals of Radar Signal Processing
P. 405
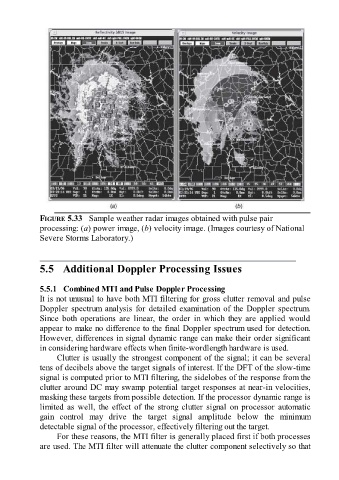
FIGURE 5.33 Sample weather radar images obtained with pulse pair
processing: (a) power image, (b) velocity image. (Images courtesy of National
Severe Storms Laboratory.)
5.5 Additional Doppler Processing Issues
5.5.1 Combined MTI and Pulse Doppler Processing
It is not unusual to have both MTI filtering for gross clutter removal and pulse
Doppler spectrum analysis for detailed examination of the Doppler spectrum.
Since both operations are linear, the order in which they are applied would
appear to make no difference to the final Doppler spectrum used for detection.
However, differences in signal dynamic range can make their order significant
in considering hardware effects when finite-wordlength hardware is used.
Clutter is usually the strongest component of the signal; it can be several
tens of decibels above the target signals of interest. If the DFT of the slow-time
signal is computed prior to MTI filtering, the sidelobes of the response from the
clutter around DC may swamp potential target responses at near-in velocities,
masking these targets from possible detection. If the processor dynamic range is
limited as well, the effect of the strong clutter signal on processor automatic
gain control may drive the target signal amplitude below the minimum
detectable signal of the processor, effectively filtering out the target.
For these reasons, the MTI filter is generally placed first if both processes
are used. The MTI filter will attenuate the clutter component selectively so that