
Page 472 - Fundamentals of Radar Signal Processing
P. 472
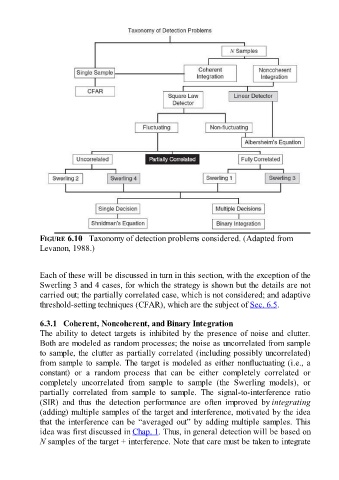
FIGURE 6.10 Taxonomy of detection problems considered. (Adapted from
Levanon, 1988.)
Each of these will be discussed in turn in this section, with the exception of the
Swerling 3 and 4 cases, for which the strategy is shown but the details are not
carried out; the partially correlated case, which is not considered; and adaptive
threshold-setting techniques (CFAR), which are the subject of Sec. 6.5.
6.3.1 Coherent, Noncoherent, and Binary Integration
The ability to detect targets is inhibited by the presence of noise and clutter.
Both are modeled as random processes; the noise as uncorrelated from sample
to sample, the clutter as partially correlated (including possibly uncorrelated)
from sample to sample. The target is modeled as either nonfluctuating (i.e., a
constant) or a random process that can be either completely correlated or
completely uncorrelated from sample to sample (the Swerling models), or
partially correlated from sample to sample. The signal-to-interference ratio
(SIR) and thus the detection performance are often improved by integrating
(adding) multiple samples of the target and interference, motivated by the idea
that the interference can be “averaged out” by adding multiple samples. This
idea was first discussed in Chap. 1. Thus, in general detection will be based on
N samples of the target + interference. Note that care must be taken to integrate