
Page 123 - Global Tectonics
P. 123
110 CHAPTER 5
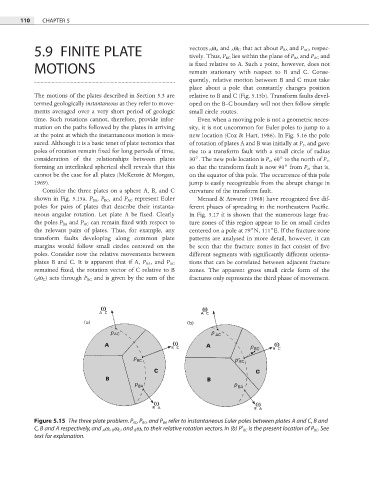
5.9 FINITE PLATE vectors B ω A and A ω C that act about P BA and P AC , respec-
tively. Thus, P BC lies within the plane of P BA and P AC and
MOTIONS is fixed relative to A. Such a point, however, does not
remain stationary with respect to B and C. Conse-
quently, relative motion between B and C must take
place about a pole that constantly changes position
The motions of the plates described in Section 5.3 are relative to B and C (Fig. 5.15b). Transform faults devel-
termed geologically instantaneous as they refer to move- oped on the B–C boundary will not then follow simple
ments averaged over a very short period of geologic small circle routes.
time. Such rotations cannot, therefore, provide infor- Even when a moving pole is not a geometric neces-
mation on the paths followed by the plates in arriving sity, it is not uncommon for Euler poles to jump to a
at the point at which the instantaneous motion is mea- new location (Cox & Hart, 1986). In Fig. 5.16 the pole
sured. Although it is a basic tenet of plate tectonics that of rotation of plates A and B was initially at P 1 , and gave
poles of rotation remain fixed for long periods of time, rise to a transform fault with a small circle of radius
consideration of the relationships between plates 30°. The new pole location is P 2 , 60° to the north of P 1 ,
forming an interlinked spherical shell reveals that this so that the transform fault is now 90° from P 2 , that is,
cannot be the case for all plates (McKenzie & Morgan, on the equator of this pole. The occurrence of this pole
1969). jump is easily recognizable from the abrupt change in
Consider the three plates on a sphere A, B, and C curvature of the transform fault.
shown in Fig. 5.15a. P BA , P BC , and P AC represent Euler Menard & Atwater (1968) have recognized fi ve dif-
poles for pairs of plates that describe their instanta- ferent phases of spreading in the northeastern Pacifi c.
neous angular rotation. Let plate A be fi xed. Clearly In Fig. 5.17 it is shown that the numerous large frac-
the poles P BA and P AC can remain fi xed with respect to ture zones of this region appear to lie on small circles
the relevant pairs of plates. Thus, for example, any centered on a pole at 79°N, 111°E. If the fracture zone
transform faults developing along common plate patterns are analysed in more detail, however, it can
margins would follow small circles centered on the be seen that the fracture zones in fact consist of fi ve
poles. Consider now the relative movements between different segments with significantly different orienta-
plates B and C. It is apparent that if A, P BA , and P AC tions that can be correlated between adjacent fracture
remained fixed, the rotation vector of C relative to B zones. The apparent gross small circle form of the
( B ω C ) acts through P BC and is given by the sum of the fractures only represents the third phase of movement.
p p
p
p p ¢
p p
Figure 5.15 The three plate problem. P AC , P BC , and P BA refer to instantaneous Euler poles between plates A and C, B and
C, B and A respectively, and A w , B w C , and B w A to their relative rotation vectors. In (b) P′ BC is the present location of P BC . See
text for explanation.