
Page 293 - Handbook of Biomechatronics
P. 293
Upper and Lower Extremity Exoskeletons 285
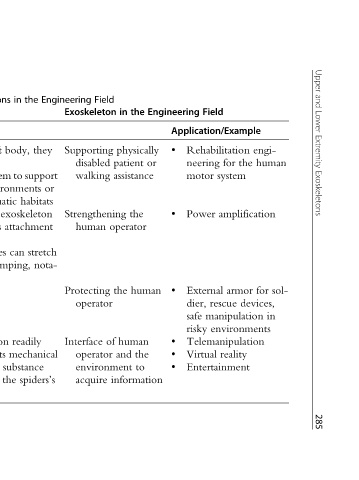
engi- human the amplification sol- for devices, in environments
Field Application/Example Rehabilitation for neering system motor Power armor External rescue dier, manipulation safe risky Telemanipulation reality Virtual Entertainment
Engineering • • • • • •
the physically or assistance the human human the to information
in patient operator the and
Field Exoskeleton Supporting disabled walking Strengthening human Protecting operator of operator environment acquire
Engineering or Interface
the they support habitats exoskeleton attachment stretch nota- readily mechanical spiders’s
in body, to environments aquatic can jumping, substance the
Exoskeletons soft a have them for in arthropod as serve apodemes for exoskeleton transmits by caused by or
and molluscs fragile difficult terrestrial in substrates the of apodemes muscles tendons, energy crab a rigid vibrations, be may gravity, by
Exoskeleton Because more more also is body their to attach Ingrowths as known for to Similar elastic store locusts in of shell spider’s conducts that stress vibrations, movement own
Biological Exoskeleton Example • are It • to • sites • to bly The • The •
the Biological the the of the of the body the
Between The Supporting body invertebrates Enhancing power animals Protecting animal’s Obtaining information, sensorium
Analogy
1 Enhancement Protection
Table Function Support Sensing