
Page 566 - Handbook of Biomechatronics
P. 566
Artificial Hearts 559
• Left atrial pressure should be maintained below 10–15mmHg to avoid
pulmonary edema, and above 0mmHg to avoid suction.
• Systolic arterial pressure should be maintained within specific limits to
ensure an adequate oxygen supply while avoiding risks associated
with hypertension.
• The system should be maximally efficient in terms of blood flow and
pump power.
In general, it is not possible to minimize all of these simultaneously, so con-
trol systems are designed that optimize performance based on cost functions
associated with deviation from the constraint. These cost functions are nor-
mally asymmetrical because of hard minima below which the patient cannot
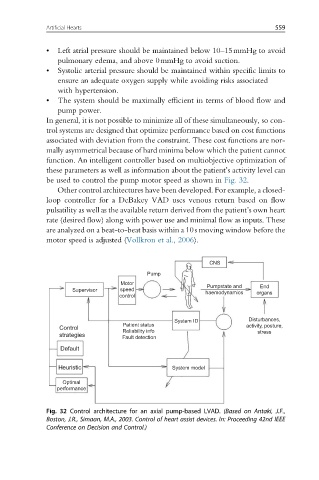
function. An intelligent controller based on multiobjective optimization of
these parameters as well as information about the patient’s activity level can
be used to control the pump motor speed as shown in Fig. 32.
Other control architectures have been developed. For example, a closed-
loop controller for a DeBakey VAD uses venous return based on flow
pulsatility as well as the available return derived from the patient’s own heart
rate (desired flow) along with power use and minimal flow as inputs. These
are analyzed on a beat-to-beat basis within a 10s moving window before the
motor speed is adjusted (Vollkron et al., 2006).
CNS
Pump
Motor Pumpstate and End
Supervisor speed haemodynamics organs
control
System ID Disturbances,
Patient status activity, posture,
Control
Reliability info stress
strategies
Fault detection
Default
Heuristic System model
Optimal
performance
Fig. 32 Control architecture for an axial pump-based LVAD. (Based on Antaki, J.F.,
Boston, J.R., Simaan, M.A., 2003. Control of heart assist devices. In: Proceeding 42nd IEEE
Conference on Decision and Control.)