
Page 154 - Human Inspired Dexterity in Robotic Manipulation
P. 154
Dynamic Manipulation Based on Thumb Opposability 151
Operator Tracking Hand
Joint information Camera
Tactile information
(A)
Grasp point
Recognition Grasp/manipulation
/motion
Camera
Task selection Motion planning Motion control
(B)
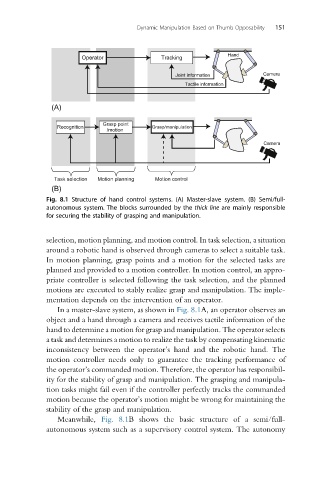
Fig. 8.1 Structure of hand control systems. (A) Master-slave system. (B) Semi/full-
autonomous system. The blocks surrounded by the thick line are mainly responsible
for securing the stability of grasping and manipulation.
selection, motion planning, and motion control. In task selection, a situation
around a robotic hand is observed through cameras to select a suitable task.
In motion planning, grasp points and a motion for the selected tasks are
planned and provided to a motion controller. In motion control, an appro-
priate controller is selected following the task selection, and the planned
motions are executed to stably realize grasp and manipulation. The imple-
mentation depends on the intervention of an operator.
In a master-slave system, as shown in Fig. 8.1A, an operator observes an
object and a hand through a camera and receives tactile information of the
hand to determine a motion for grasp and manipulation. The operator selects
a task and determines a motion to realize the task by compensating kinematic
inconsistency between the operator’s hand and the robotic hand. The
motion controller needs only to guarantee the tracking performance of
the operator’s commanded motion. Therefore, the operator has responsibil-
ity for the stability of grasp and manipulation. The grasping and manipula-
tion tasks might fail even if the controller perfectly tracks the commanded
motion because the operator’s motion might be wrong for maintaining the
stability of the grasp and manipulation.
Meanwhile, Fig. 8.1B shows the basic structure of a semi/full-
autonomous system such as a supervisory control system. The autonomy