
Page 105 - Introduction to Autonomous Mobile Robots
P. 105
90
a) b) Pan-Tilt Chapter 4
Stereo Camera
Sonar Sensors
IR Sensors
c)
Omnidirectional
Camera
IMU
Inertial
Measurement Pan-Tilt
Unit Camera
Emergency Sonar
Stop Sensors
Button
Laser
Range
Wheel Scanner
Encoders
Bumper
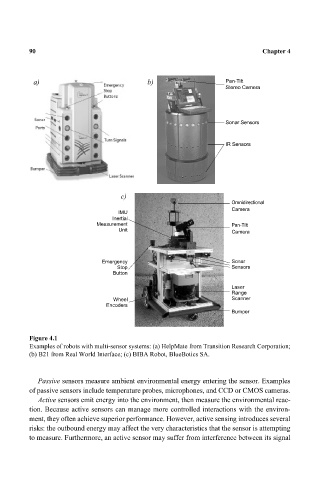
Figure 4.1
Examples of robots with multi-sensor systems: (a) HelpMate from Transition Research Corporation;
(b) B21 from Real World Interface; (c) BIBA Robot, BlueBotics SA.
Passive sensors measure ambient environmental energy entering the sensor. Examples
of passive sensors include temperature probes, microphones, and CCD or CMOS cameras.
Active sensors emit energy into the environment, then measure the environmental reac-
tion. Because active sensors can manage more controlled interactions with the environ-
ment, they often achieve superior performance. However, active sensing introduces several
risks: the outbound energy may affect the very characteristics that the sensor is attempting
to measure. Furthermore, an active sensor may suffer from interference between its signal