
Page 102 - Introduction to Autonomous Mobile Robots
P. 102
Mobile Robot Kinematics
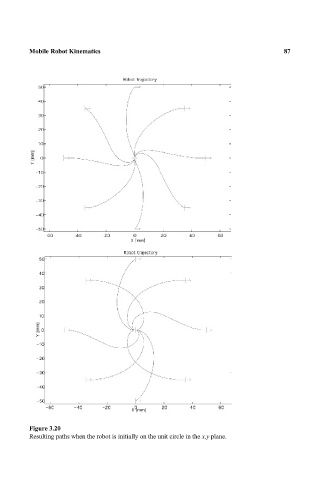
Figure 3.20 87
Resulting paths when the robot is initially on the unit circle in the x,y plane.