
Page 150 - Introduction to Autonomous Mobile Robots
P. 150
Perception
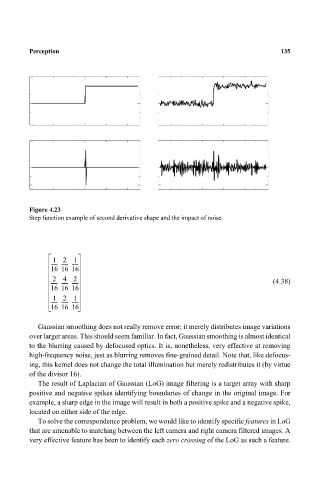
Figure 4.23 135
Step function example of second derivative shape and the impact of noise.
1 2 1
----- ----- ----- -
-
-
16 16 16
2 4 2
-
----- ------ ------ (4.38)
16 16 16
1 2 1
----- ----- ----- -
-
-
16 16 16
Gaussian smoothing does not really remove error; it merely distributes image variations
over larger areas. This should seem familiar. In fact, Gaussian smoothing is almost identical
to the blurring caused by defocused optics. It is, nonetheless, very effective at removing
high-frequency noise, just as blurring removes fine-grained detail. Note that, like defocus-
ing, this kernel does not change the total illumination but merely redistributes it (by virtue
of the divisor 16).
The result of Laplacian of Gaussian (LoG) image filtering is a target array with sharp
positive and negative spikes identifying boundaries of change in the original image. For
example, a sharp edge in the image will result in both a positive spike and a negative spike,
located on either side of the edge.
To solve the correspondence problem, we would like to identify specific features in LoG
that are amenable to matching between the left camera and right camera filtered images. A
very effective feature has been to identify each zero crossing of the LoG as such a feature.