
Page 177 - Introduction to Autonomous Mobile Robots
P. 177
162
a) b) Chapter 4
B
A
δ
C
E F
D 20°
c) n
δ [°]
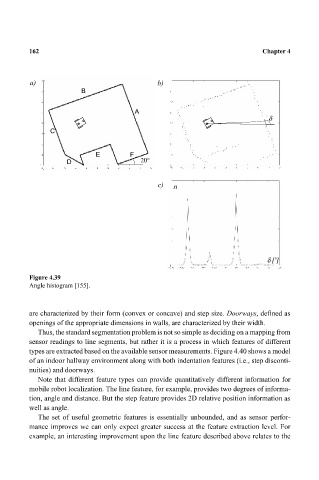
Figure 4.39
Angle histogram [155].
are characterized by their form (convex or concave) and step size. Doorways, defined as
openings of the appropriate dimensions in walls, are characterized by their width.
Thus, the standard segmentation problem is not so simple as deciding on a mapping from
sensor readings to line segments, but rather it is a process in which features of different
types are extracted based on the available sensor measurements. Figure 4.40 shows a model
of an indoor hallway environment along with both indentation features (i.e., step disconti-
nuities) and doorways.
Note that different feature types can provide quantitatively different information for
mobile robot localization. The line feature, for example, provides two degrees of informa-
tion, angle and distance. But the step feature provides 2D relative position information as
well as angle.
The set of useful geometric features is essentially unbounded, and as sensor perfor-
mance improves we can only expect greater success at the feature extraction level. For
example, an interesting improvement upon the line feature described above relates to the