
Page 178 - Introduction to Autonomous Mobile Robots
P. 178
Perception
Figure 4.40 163
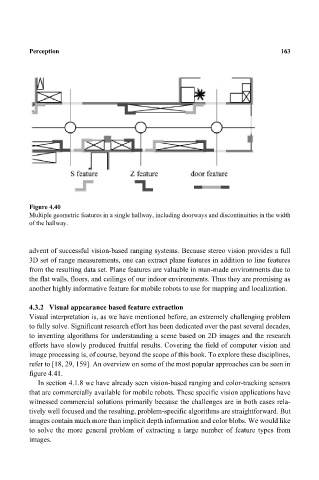
Multiple geometric features in a single hallway, including doorways and discontinuities in the width
of the hallway.
advent of successful vision-based ranging systems. Because stereo vision provides a full
3D set of range measurements, one can extract plane features in addition to line features
from the resulting data set. Plane features are valuable in man-made environments due to
the flat walls, floors, and ceilings of our indoor environments. Thus they are promising as
another highly informative feature for mobile robots to use for mapping and localization.
4.3.2 Visual appearance based feature extraction
Visual interpretation is, as we have mentioned before, an extremely challenging problem
to fully solve. Significant research effort has been dedicated over the past several decades,
to inventing algorithms for understanding a scene based on 2D images and the research
efforts have slowly produced fruitful results. Covering the field of computer vision and
image processing is, of course, beyond the scope of this book. To explore these disciplines,
refer to [18, 29, 159]. An overview on some of the most popular approaches can be seen in
figure 4.41.
In section 4.1.8 we have already seen vision-based ranging and color-tracking sensors
that are commercially available for mobile robots. These specific vision applications have
witnessed commercial solutions primarily because the challenges are in both cases rela-
tively well focused and the resulting, problem-specific algorithms are straightforward. But
images contain much more than implicit depth information and color blobs. We would like
to solve the more general problem of extracting a large number of feature types from
images.