
Page 179 - Introduction to Autonomous Mobile Robots
P. 179
164
Image Processing Scheme Tools in Computer Vision Chapter 4
Computer Vision
threshold- edge
conditioning ing detection filtering
image simplified image
connected
compo-
labeling/grouping correlation
nent
labeling
environment Hough
groups of pixel transfor-
mation
extracting disparity
cognition / action matching model
properties
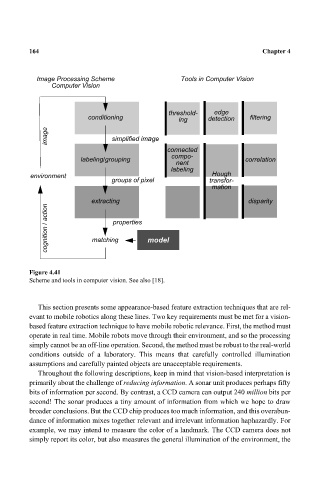
Figure 4.41
Scheme and tools in computer vision. See also [18].
This section presents some appearance-based feature extraction techniques that are rel-
evant to mobile robotics along these lines. Two key requirements must be met for a vision-
based feature extraction technique to have mobile robotic relevance. First, the method must
operate in real time. Mobile robots move through their environment, and so the processing
simply cannot be an off-line operation. Second, the method must be robust to the real-world
conditions outside of a laboratory. This means that carefully controlled illumination
assumptions and carefully painted objects are unacceptable requirements.
Throughout the following descriptions, keep in mind that vision-based interpretation is
primarily about the challenge of reducing information. A sonar unit produces perhaps fifty
bits of information per second. By contrast, a CCD camera can output 240 million bits per
second! The sonar produces a tiny amount of information from which we hope to draw
broader conclusions. But the CCD chip produces too much information, and this overabun-
dance of information mixes together relevant and irrelevant information haphazardly. For
example, we may intend to measure the color of a landmark. The CCD camera does not
simply report its color, but also measures the general illumination of the environment, the