
Page 263 - Introduction to Autonomous Mobile Robots
P. 263
248
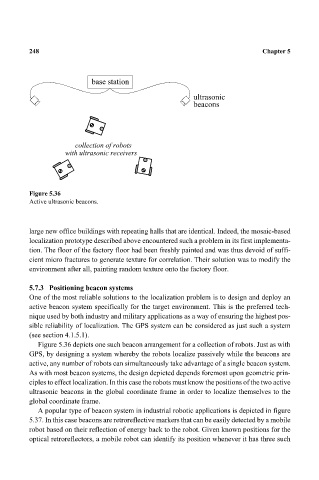
base station Chapter 5
ultrasonic
beacons
collection of robots
with ultrasonic receivers
Figure 5.36
Active ultrasonic beacons.
large new office buildings with repeating halls that are identical. Indeed, the mosaic-based
localization prototype described above encountered such a problem in its first implementa-
tion. The floor of the factory floor had been freshly painted and was thus devoid of suffi-
cient micro fractures to generate texture for correlation. Their solution was to modify the
environment after all, painting random texture onto the factory floor.
5.7.3 Positioning beacon systems
One of the most reliable solutions to the localization problem is to design and deploy an
active beacon system specifically for the target environment. This is the preferred tech-
nique used by both industry and military applications as a way of ensuring the highest pos-
sible reliability of localization. The GPS system can be considered as just such a system
(see section 4.1.5.1).
Figure 5.36 depicts one such beacon arrangement for a collection of robots. Just as with
GPS, by designing a system whereby the robots localize passively while the beacons are
active, any number of robots can simultaneously take advantage of a single beacon system.
As with most beacon systems, the design depicted depends foremost upon geometric prin-
ciples to effect localization. In this case the robots must know the positions of the two active
ultrasonic beacons in the global coordinate frame in order to localize themselves to the
global coordinate frame.
A popular type of beacon system in industrial robotic applications is depicted in figure
5.37. In this case beacons are retroreflective markers that can be easily detected by a mobile
robot based on their reflection of energy back to the robot. Given known positions for the
optical retroreflectors, a mobile robot can identify its position whenever it has three such