
Page 264 - Introduction to Autonomous Mobile Robots
P. 264
Mobile Robot Localization
θ 249
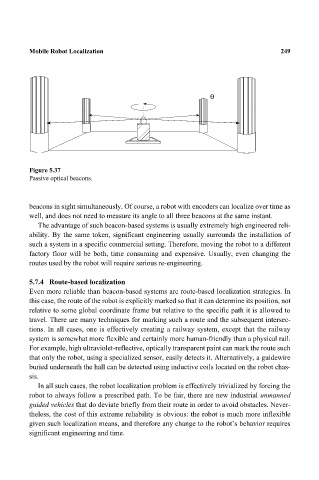
Figure 5.37
Passive optical beacons.
beacons in sight simultaneously. Of course, a robot with encoders can localize over time as
well, and does not need to measure its angle to all three beacons at the same instant.
The advantage of such beacon-based systems is usually extremely high engineered reli-
ability. By the same token, significant engineering usually surrounds the installation of
such a system in a specific commercial setting. Therefore, moving the robot to a different
factory floor will be both, time consuming and expensive. Usually, even changing the
routes used by the robot will require serious re-engineering.
5.7.4 Route-based localization
Even more reliable than beacon-based systems are route-based localization strategies. In
this case, the route of the robot is explicitly marked so that it can determine its position, not
relative to some global coordinate frame but relative to the specific path it is allowed to
travel. There are many techniques for marking such a route and the subsequent intersec-
tions. In all cases, one is effectively creating a railway system, except that the railway
system is somewhat more flexible and certainly more human-friendly than a physical rail.
For example, high ultraviolet-reflective, optically transparent paint can mark the route such
that only the robot, using a specialized sensor, easily detects it. Alternatively, a guidewire
buried underneath the hall can be detected using inductive coils located on the robot chas-
sis.
In all such cases, the robot localization problem is effectively trivialized by forcing the
robot to always follow a prescribed path. To be fair, there are new industrial unmanned
guided vehicles that do deviate briefly from their route in order to avoid obstacles. Never-
theless, the cost of this extreme reliability is obvious: the robot is much more inflexible
given such localization means, and therefore any change to the robot’s behavior requires
significant engineering and time.