
Page 311 - Introduction to Autonomous Mobile Robots
P. 311
Chapter 6
296
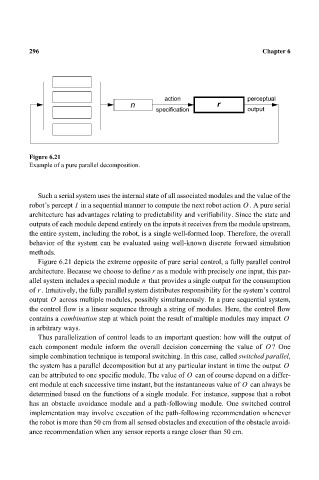
action perceptual
n r
specification output
Figure 6.21
Example of a pure parallel decomposition.
Such a serial system uses the internal state of all associated modules and the value of the
I
robot’s percept in a sequential manner to compute the next robot action O . A pure serial
architecture has advantages relating to predictability and verifiability. Since the state and
outputs of each module depend entirely on the inputs it receives from the module upstream,
the entire system, including the robot, is a single well-formed loop. Therefore, the overall
behavior of the system can be evaluated using well-known discrete forward simulation
methods.
Figure 6.21 depicts the extreme opposite of pure serial control, a fully parallel control
architecture. Because we choose to define r as a module with precisely one input, this par-
n
allel system includes a special module that provides a single output for the consumption
of . Intuitively, the fully parallel system distributes responsibility for the system’s control
r
output O across multiple modules, possibly simultaneously. In a pure sequential system,
the control flow is a linear sequence through a string of modules. Here, the control flow
contains a combination step at which point the result of multiple modules may impact O
in arbitrary ways.
Thus parallelization of control leads to an important question: how will the output of
each component module inform the overall decision concerning the value of O ? One
simple combination technique is temporal switching. In this case, called switched parallel,
the system has a parallel decomposition but at any particular instant in time the output O
can be attributed to one specific module. The value of O can of course depend on a differ-
ent module at each successive time instant, but the instantaneous value of can always be
O
determined based on the functions of a single module. For instance, suppose that a robot
has an obstacle avoidance module and a path-following module. One switched control
implementation may involve execution of the path-following recommendation whenever
the robot is more than 50 cm from all sensed obstacles and execution of the obstacle avoid-
ance recommendation when any sensor reports a range closer than 50 cm.