
Page 314 - Introduction to Autonomous Mobile Robots
P. 314
Planning and Navigation
Path planning 299
Executive
Real-time controller
behavior 1 behavior 2 behavior 3
PID motion control
Robot Hardware
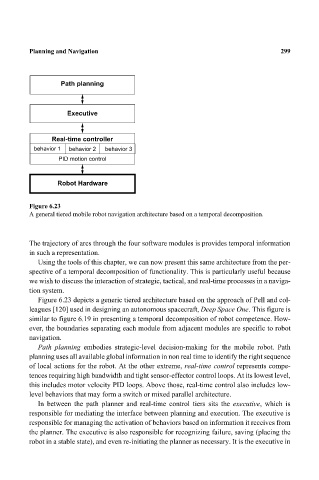
Figure 6.23
A general tiered mobile robot navigation architecture based on a temporal decomposition.
The trajectory of arcs through the four software modules is provides temporal information
in such a representation.
Using the tools of this chapter, we can now present this same architecture from the per-
spective of a temporal decomposition of functionality. This is particularly useful because
we wish to discuss the interaction of strategic, tactical, and real-time processes in a naviga-
tion system.
Figure 6.23 depicts a generic tiered architecture based on the approach of Pell and col-
leagues [120] used in designing an autonomous spacecraft, Deep Space One. This figure is
similar to figure 6.19 in presenting a temporal decomposition of robot competence. How-
ever, the boundaries separating each module from adjacent modules are specific to robot
navigation.
Path planning embodies strategic-level decision-making for the mobile robot. Path
planning uses all available global information in non real time to identify the right sequence
of local actions for the robot. At the other extreme, real-time control represents compe-
tences requiring high bandwidth and tight sensor-effector control loops. At its lowest level,
this includes motor velocity PID loops. Above those, real-time control also includes low-
level behaviors that may form a switch or mixed parallel architecture.
In between the path planner and real-time control tiers sits the executive, which is
responsible for mediating the interface between planning and execution. The executive is
responsible for managing the activation of behaviors based on information it receives from
the planner. The executive is also responsible for recognizing failure, saving (placing the
robot in a stable state), and even re-initiating the planner as necessary. It is the executive in