
Page 313 - Introduction to Autonomous Mobile Robots
P. 313
Chapter 6
298
Localization Position Cognition
Position
Local Map
Mixed Approach Environment Model Perception to Action Obstacle Avoidance Position Feedback Path
Local Map
Local Map
Real World
Environment
Perception Motion Control
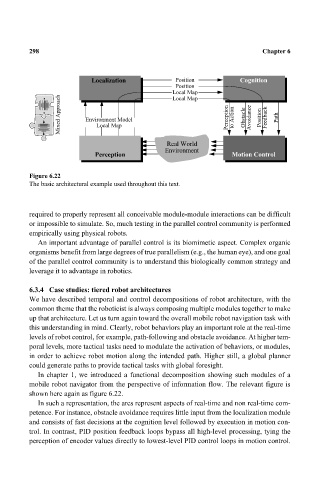
Figure 6.22
The basic architectural example used throughout this text.
required to properly represent all conceivable module-module interactions can be difficult
or impossible to simulate. So, much testing in the parallel control community is performed
empirically using physical robots.
An important advantage of parallel control is its biomimetic aspect. Complex organic
organisms benefit from large degrees of true parallelism (e.g., the human eye), and one goal
of the parallel control community is to understand this biologically common strategy and
leverage it to advantage in robotics.
6.3.4 Case studies: tiered robot architectures
We have described temporal and control decompositions of robot architecture, with the
common theme that the roboticist is always composing multiple modules together to make
up that architecture. Let us turn again toward the overall mobile robot navigation task with
this understanding in mind. Clearly, robot behaviors play an important role at the real-time
levels of robot control, for example, path-following and obstacle avoidance. At higher tem-
poral levels, more tactical tasks need to modulate the activation of behaviors, or modules,
in order to achieve robot motion along the intended path. Higher still, a global planner
could generate paths to provide tactical tasks with global foresight.
In chapter 1, we introduced a functional decomposition showing such modules of a
mobile robot navigator from the perspective of information flow. The relevant figure is
shown here again as figure 6.22.
In such a representation, the arcs represent aspects of real-time and non real-time com-
petence. For instance, obstacle avoidance requires little input from the localization module
and consists of fast decisions at the cognition level followed by execution in motion con-
trol. In contrast, PID position feedback loops bypass all high-level processing, tying the
perception of encoder values directly to lowest-level PID control loops in motion control.