
Page 241 - Introduction to Computational Fluid Dynamics
P. 241
P1: IBE
CB908/Date
0521853265c07
220
PHASE CHANGE
2.0 0 521 85326 5 May 25, 2005 11:14
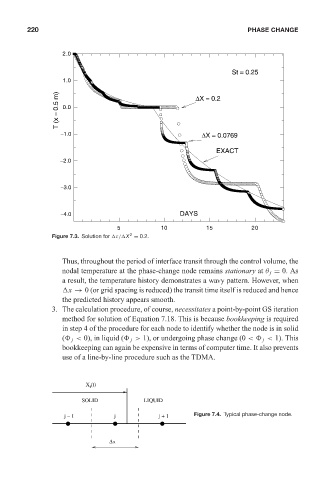
St = 0.25
1.0
T (x = 0.5 m) 0.0 ∆X = 0.2
−1.0 ∆X = 0.0769
EXACT
−2.0
−3.0
−4.0 DAYS
5 10 15 20
2
Figure 7.3. Solution for τ/ X = 0.2.
Thus, throughout the period of interface transit through the control volume, the
nodal temperature at the phase-change node remains stationary at θ j = 0. As
a result, the temperature history demonstrates a wavy pattern. However, when
x → 0 (or grid spacing is reduced) the transit time itself is reduced and hence
the predicted history appears smooth.
3. The calculation procedure, of course, necessitates a point-by-point GS iteration
method for solution of Equation 7.18. This is because bookkeeping is required
in step 4 of the procedure for each node to identify whether the node is in solid
( j < 0), in liquid ( j > 1), or undergoing phase change (0 < j < 1). This
bookkeeping can again be expensive in terms of computer time. It also prevents
use of a line-by-line procedure such as the TDMA.
(t)
X i
SOLID LIQUID
j − 1 j j + 1 Figure 7.4. Typical phase-change node.
∆x