
Page 397 - Introduction to Information Optics
P. 397
382 7. Pattern Recognition with Optics
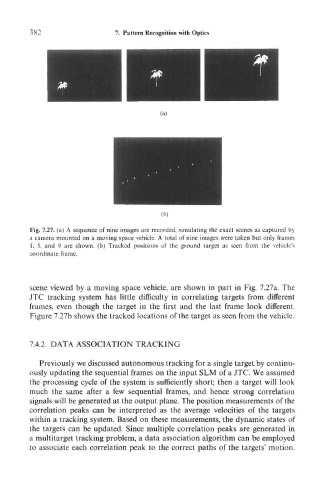
Fig. 7.27. (a) A sequence of nine images are recorded, simulating the exact scenes as captured by
a camera mounted on a moving space vehicle. A total of nine images were taken but only frames
1, 5, and 9 are shown, (b) Tracked positions of the ground target as seen from the vehicle's
coordinate frame.
scene viewed by a moving space vehicle, are shown in part in Fig. 7.27a. The
JTC tracking system has little difficulty in correlating targets from different
frames, even though the target in the first and the last frame look different.
Figure 7.27b shows the tracked locations of the target as seen from the vehicle.
7.4.2. DATA ASSOCIATION TRACKING
Previously we discussed autonomous tracking for a single target by continu-
ously updating the sequential frames on the input SLM of a JTC. We assumed
the processing cycle of the system is sufficiently short; then a target will look
much the same after a few sequential frames, and hence strong correlation
signals will be generated at the output plane. The position measurements of the
correlation peaks can be interpreted as the average velocities of the targets
within a tracking system. Based on these measurements, the dynamic states of
the targets can be updated. Since multiple correlation peaks are generated in
a multitarget tracking problem, a data association algorithm can be employed
to associate each correlation peak to the correct paths of the targets' motion.