
Page 401 - Introduction to Information Optics
P. 401
386 7. Pattern Recognition with Optics
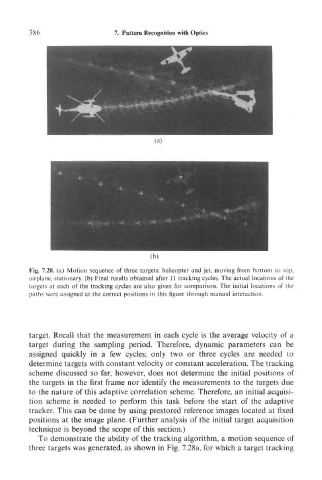
Fig. 7.28. (a) Motion sequence of three targets: helicopter and jet, moving from bottom to top;
airplane, stationary, (b) Final results obtained after 11 tracking cycles. The actual locations of the
targets at each of the tracking cycles are also given for comparison. The initial locations of the
paths were assigned at the correct positions in this figure through manual interaction.
target. Recall that the measurement in each cycle is the average velocity of a
target during the sampling period. Therefore, dynamic parameters can be
assigned quickly in a few cycles; only two or three cycles are needed to
determine targets with constant velocity or constant acceleration. The tracking
scheme discussed so far, however, does not determine the initial positions of
the targets in the first frame nor identify the measurements to the targets due
to the nature of this adaptive correlation scheme. Therefore, an initial acquisi-
tion scheme is needed to perform this task before the start of the adaptive
tracker. This can be done by using prestored reference images located at fixed
positions at the image plane. (Further analysis of the initial target acquisition
technique is beyond the scope of this section.)
To demonstrate the ability of the tracking algorithm, a motion sequence of
three targets was generated, as shown in Fig. 7.28a, for which a target tracking