
Page 273 - Making PIC Microcontroller Instruments and Controllers
P. 273
aN aRTIFICIAL HoRlzoI! a TABLE SUnFACE tlulT sTAYs LEVEI
-o
I
o
oo
-o
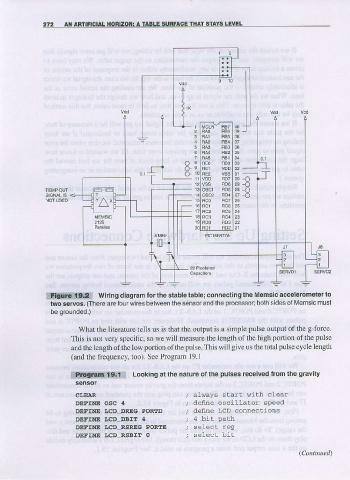
lttffiitii5gial wiring diagram forthe stable lable; con necling the Memsic accelerometerto
two servos. (There are four wires belween the sensor and the processor;bolh musl
sides ol l\4emsic
be grounded.)
What the lilerature lells us is that the output is a simple pulse output of the g-force
This is not very specific, so we will measure the length of the high porLion of the pulse
and the length of the low portion of the pulse. This will give us the totrl pulsc cycle length
(and the frequency, too). See Program 19.1
Looking at the nalure of lhe pulses received from the gravlty
|i!i!l!.8iin$*fl
CLE]AR
DEFINE OSC 4 deflne osciLlator speed
DEFINE I,cD DREG PORTD deine LCD connections
DEFINE I.CD DBIT 4
DEFIIIE I.CD RSREG PORTE
DEFTNE I.CD RSBIT O