
Page 272 - Mathematical Techniques of Fractional Order Systems
P. 272
Design of Fractional Order Fuzzy Sliding Mode Controller Chapter | 9 261
_
ð
V 52 s Eφ 1 ksÞ ð9:58Þ
As, s . 0 as well as Eφ 1 ks . 0
_
V 52 s Eφ 1 ksÞ , 0 ð9:59Þ
ð
_
Eq. (9.59) shows that V , 0 which states that the designed controller for
exponential law will be stable for s . 0.
Case II: When s , 0 then sat sðÞ , 0
Let sat sðÞ 52 φ, where, φ . 0.
From (9.56)
_
ð
V 5 s Eφ 2 ksÞ ð9:60Þ
Let, Ω 52 s such that Ω . 0
Now from (9.59),
_
ð
V 52 Ω Eφ 1 kΩÞ ð9:61Þ
_
Since; Ω Eφ 1 kΩÞ . 0; V 52 Ω Eφ 1 kΩÞ , 0 ð9:62Þ
ð
ð
_
Eq. (9.62) shows that V , 0 which further states that the designed con-
troller for exponential law will be stable for s , 0. On the basis of results
obtained from (9.59) and (9.62), it can be inferred that the above design of
IOFSMCPD and FOFSMCPD controllers will follow the Lyapunov stability
theory and plant output will be bounded for bounded input. The block
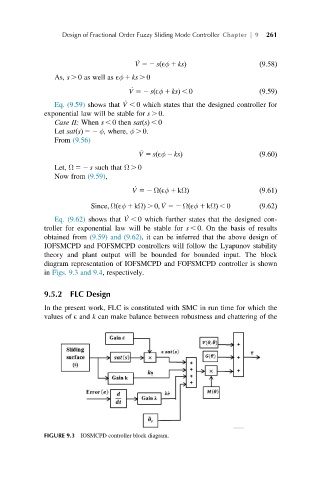
diagram representation of IOFSMCPD and FOFSMCPD controller is shown
in Figs. 9.3 and 9.4, respectively.
9.5.2 FLC Design
In the present work, FLC is constituted with SMC in run time for which the
values of E and k can make balance between robustness and chattering of the
FIGURE 9.3 IOSMCPD controller block diagram.