
Page 268 - Mathematical Techniques of Fractional Order Systems
P. 268
Design of Fractional Order Fuzzy Sliding Mode Controller Chapter | 9 257
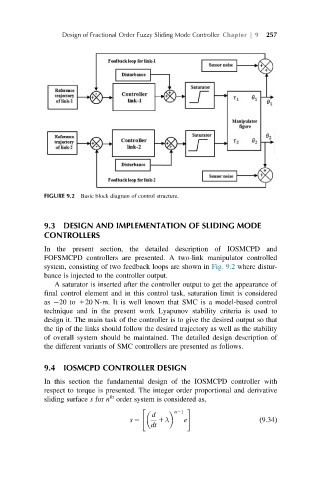
FIGURE 9.2 Basic block diagram of control structure.
9.3 DESIGN AND IMPLEMENTATION OF SLIDING MODE
CONTROLLERS
In the present section, the detailed description of IOSMCPD and
FOFSMCPD controllers are presented. A two-link manipulator controlled
system, consisting of two feedback loops are shown in Fig. 9.2 where distur-
bance is injected to the controller output.
A saturator is inserted after the controller output to get the appearance of
final control element and in this control task, saturation limit is considered
as 20 to 120 N-m. It is well known that SMC is a model-based control
technique and in the present work Lyapunov stability criteria is used to
design it. The main task of the controller is to give the desired output so that
the tip of the links should follow the desired trajectory as well as the stability
of overall system should be maintained. The detailed design description of
the different variants of SMC controllers are presented as follows.
9.4 IOSMCPD CONTROLLER DESIGN
In this section the fundamental design of the IOSMCPD controller with
respect to torque is presented. The integer order proportional and derivative
th
sliding surface s for n order system is considered as,
" #
d
n21
s 5 1λ e ð9:34Þ
dt