
Page 339 - Mechanical Engineers' Handbook (Volume 2)
P. 339
330 Mathematical Models of Dynamic Physical Systems
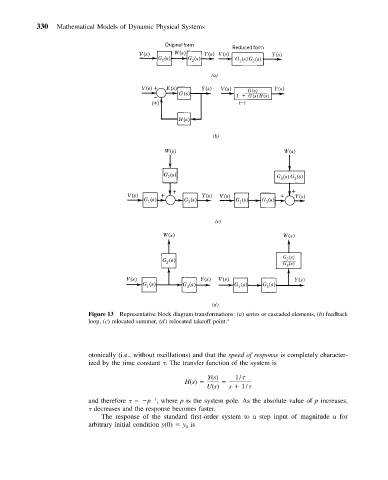
Figure 13 Representative block diagram transformations: (a) series or cascaded elements, (b) feedback
loop, (c) relocated summer, (d) relocated takeoff point. 4
otonically (i.e., without oscillations) and that the speed of response is completely character-
ized by the time constant . The transfer function of the system is
Y(s) 1/
H(s)
U(s) s 1/
1
and therefore p , where p is the system pole. As the absolute value of p increases,
decreases and the response becomes faster.
The response of the standard first-order system to a step input of magnitude u for
arbitrary initial condition y(0) y is
0