
Page 425 - Mechanical Engineers' Handbook (Volume 2)
P. 425
416 Basic Control Systems Design
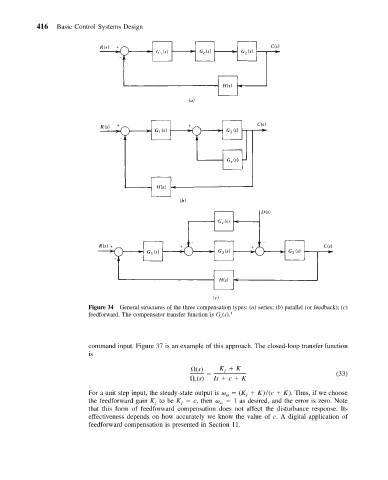
Figure 34 General structures of the three compensation types: (a) series; (b) parallel (or feedback); (c)
feedforward. The compensator transfer function is G c (s). 1
command input. Figure 37 is an example of this approach. The closed-loop transfer function
is
(s) K K
ƒ
(33)
(s) Is c K
r
For a unit step input, the steady-state output is (K K)/(c K). Thus, if we choose
ss
ƒ
the feedforward gain K to be K c, then 1 as desired, and the error is zero. Note
ss
ƒ
ƒ
that this form of feedforward compensation does not affect the disturbance response. Its
effectiveness depends on how accurately we know the value of c. A digital application of
feedforward compensation is presented in Section 11.