
Page 427 - Mechanical Engineers' Handbook (Volume 2)
P. 427
418 Basic Control Systems Design
Figure 37 Feedforward compensation of the command input to augment proportional control. 2
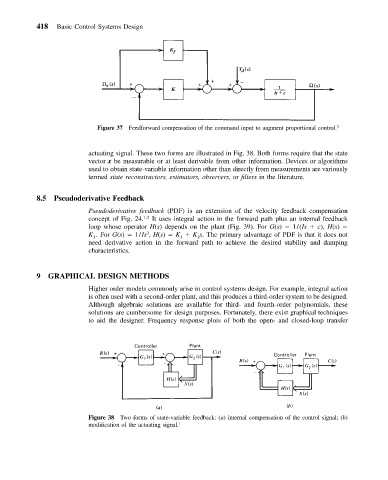
actuating signal. These two forms are illustrated in Fig. 38. Both forms require that the state
vector x be measurable or at least derivable from other information. Devices or algorithms
used to obtain state-variable information other than directly from measurements are variously
termed state reconstructors, estimators, observers, or filters in the literature.
8.5 Pseudoderivative Feedback
Pseudoderivative feedback (PDF) is an extension of the velocity feedback compensation
concept of Fig. 24. 1,2 It uses integral action in the forward path plus an internal feedback
loop whose operator H(s) depends on the plant (Fig. 39). For G(s) 1/(Is c), H(s)
2
K .For G(s) 1/Is , H(s) K K s. The primary advantage of PDF is that it does not
1 1 2
need derivative action in the forward path to achieve the desired stability and damping
characteristics.
9 GRAPHICAL DESIGN METHODS
Higher order models commonly arise in control systems design. For example, integral action
is often used with a second-order plant, and this produces a third-order system to be designed.
Although algebraic solutions are available for third- and fourth-order polynomials, these
solutions are cumbersome for design purposes. Fortunately, there exist graphical techniques
to aid the designer. Frequency response plots of both the open- and closed-loop transfer
Figure 38 Two forms of state-variable feedback: (a) internal compensation of the control signal; (b)
modification of the actuating signal. 1